A great explanation about lidar data can be found here. What’s important to know in the context of track building:
- Lidar data is technically laserscanned but don’t expect millimeter precision. The best publicly available aerial lidar data has a precision of about 5cm, which means that the road surface will be rather “noisy” and will need to be smoothened out. While we can obtain a nice overall road shape, we won’t be able to capture the bumps and cracks in the road. Laserscanned race tracks are scanned using terrestrial scanners, which is a slow and expensive process. Mobile laserscanning solutions exist (manual or vehicle based), but are no more precise or very expensive.
- The terms “accuracy” and “precision” are often used interchangeably but don’t mean the same thing:

- An important parameter is points density, which refers to the number of points per square meter in the data. Sometimes point density can be as low as 1-2 points per m², while the best available data has 25-30/m² (and higher probably exists). Just like the resolution in a picture, higher point density offers more detail but it doesn’t necessarily mean the picture is sharper (cfr the precision of each point)
- The most commonly used format for lidar data is .laz, this is the compressed version of the original .las format (5-10x smaller). The copc.laz format is now appearing more and more, 100% backwards compatible with the .laz format but structured in such a way to allow streaming & rendering without loading the entire file into memory.
- Lidar data is always set in a specific, projected coordinate system. This information is not always included in the file but important to know if you want to do certain operations! If it’s not in the file, it’s normally indicated where you download the data by an EPSG code.
- The best lidar data is classified: this means it’s processed so each point is assigned a class like ground, building, vegetation etc. This way it’s easy to remove vegetation and buildings from the terrain. This is not always 100% precise but getting better and better as machine learning techniques improve.
- Public lidar data is usually offered cut into tiles to keep things manageable, the tiles can be merged again into 1 larger file.
- When the terrain gets larger it quickly becomes difficult to handle for a regular pc, even more so after converting into a mesh. This can be overcome by thinning by distance from the road.
- The road/terrain mesh generated from the lidar data should not be used directly in-game, but serve as a scaffold for shrinkwrapping.
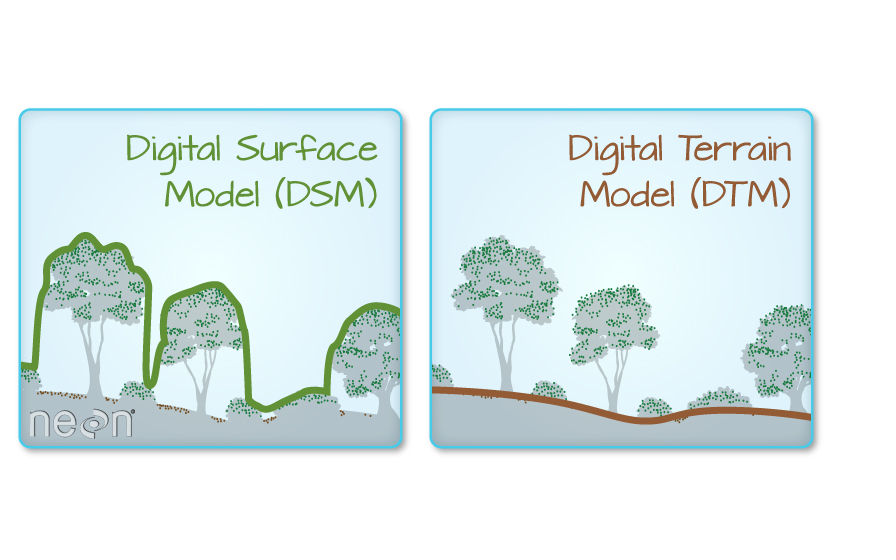
- A point cloud can be converted into a DSM = Digital Surface Model or (when classified) into a DTM = Digital Terrain model, where all objects on the terrain are removed. DTM/DSM usually com in the form of a GeoTIFF raster: this is a like an aerial picture where each pixel represents an altitude value. For some regions where no lidar data is available terrain models can be found, with resolutions up to 1m – still a lot better than Google terrain data!